一、研究背景:
可穿戴触觉传感界面对于精确地控制设备、机器人或虚拟环境至关重要,在人类与机器之间架起一道桥梁,促进了人工智能物联网的发展。为了追求高效的人机交互体验,提高触觉传感界面的灵敏度和检测范围尤为必要。高灵敏度使触觉传感界面能够检测细微的机械刺激,宽探测范围则允许更通用的应用场景。在追求这一目标时,模仿皮肤结构是一个重要策略,因为人体皮肤本身具备出色的触觉感知能力。一般的仿生策略通常无法兼顾灵敏度和检测范围,二者之间存在显著的竞争关系。平衡触觉传感界面的灵敏度和检测范围来实现精细的压力检测和大范围的压力辨别仍然面临诸多挑战。
二、文章简介:
近日,太阳集团官方网站入口陈忠/廖新勤团队提出了一种新颖的跨尺度设计策略来解决这个挑战。在纳米尺度上,研究团队采用甲基纤维素和碳纳米管进行复合,使敏感材料能完美地贴附在微米级的起伏表面上形成牢固导电网络。在毫米与微米尺度上,拱形分层结构与棘突结构协同工作,精确调节接触面积变化步长,提高触觉传感界面灵敏度和检测范围。这种跨尺度设计策略能够确保低应力下的极小的初始接触面积,提高了灵敏度,在大变形过程中提供更多的结构支撑,以扩大检测范围,巧妙地解决触觉传感界面灵敏度和检测范围存在的此长彼消问题。相关研究成果发表于Advanced Functional Materials。文章第一作者是博士生林万胜,通讯作者为陈忠教授和廖新勤副教授。
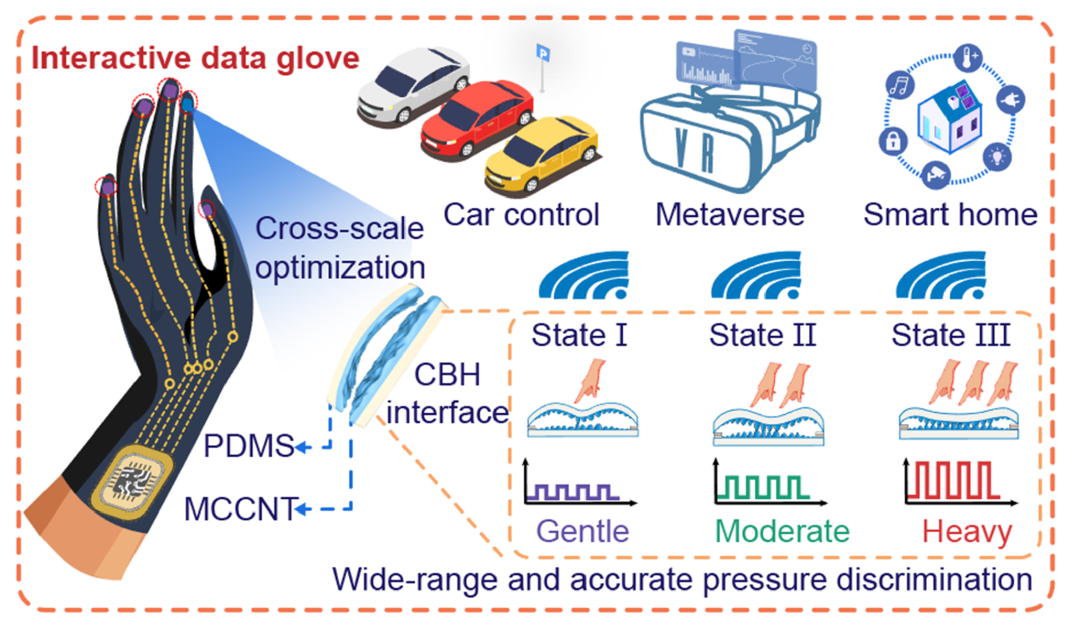
三、研究内容:研究团队通过纳米-微米-毫米三个维度的精心设计实现触觉传感界面性能的精准调控。在纳米尺度上,研究团队采用甲基纤维素和碳纳米管进行复合,实现甲基纤维素良好的成膜特性和碳纳米管优异导电特性互补,提高了敏感材料的机械强度,并使其能完美地贴附在微米级的起伏表面上形成牢固导电网络。在微米尺度上,研究团队通过剥离转印技术,复刻了模板表面随机分布的微结构以模仿皮肤的表皮-真皮互锁结构,用于提高触觉传感界面灵敏度和检测范围。在毫米尺度上,研究团队采用拱形分层的组装,重构了触觉传感界面的机械形变过程,优化了接触面积的步长,能够同时实现灵敏度和检测范围的进一步提升。这种跨尺度设计实现了敏感材料与传感结构间的相互协同,巧妙地解决触觉传感界面灵敏度和检测范围存在的此长彼消问题。作为验证,研究团队开发了集成跨尺度仿生触觉传感界面的数据手套,凭借优异的压力辨别能力能够充分利用指尖信息和多指协同,实现全天候的、灵活的人机交互,即使在黑暗中也能进行自由操控。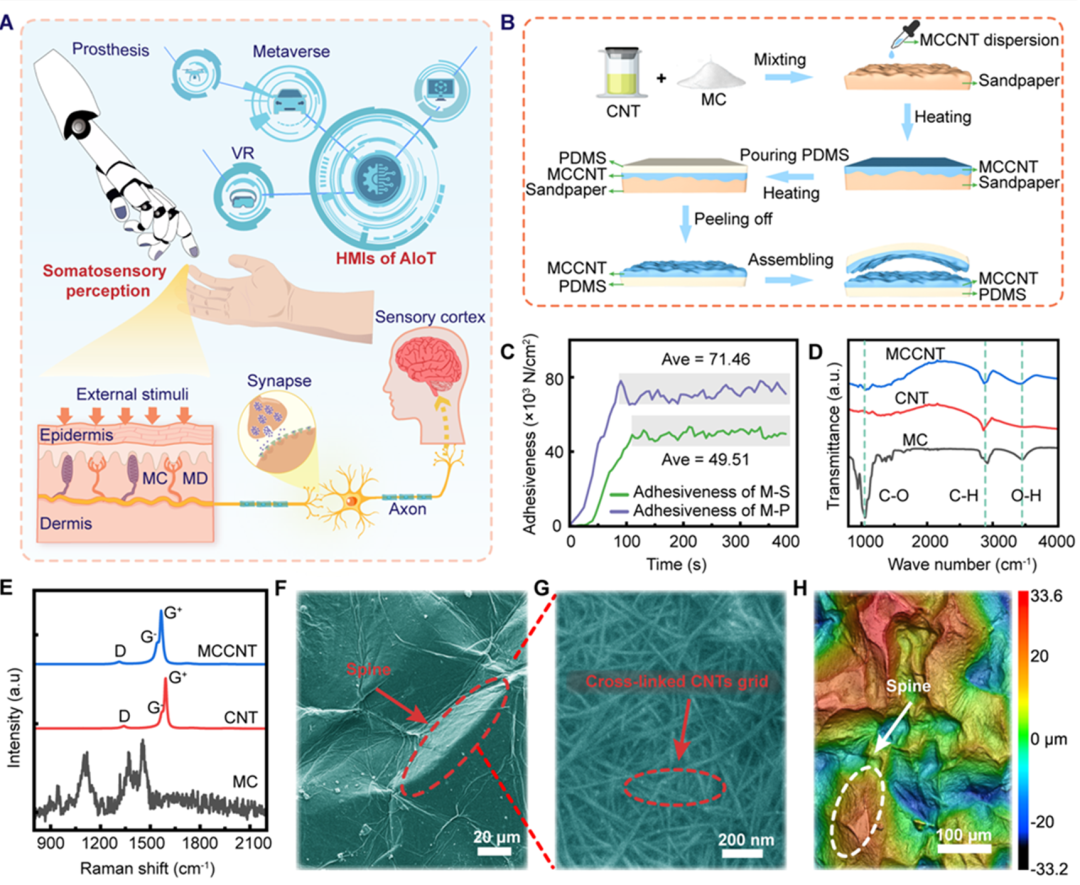
图1. 跨尺度仿生触觉传感界面的制备和表征。